Upload a Generic E57/LAS/LAZ
This article describes how to import a generic E57/LAS/LAZ formatted scan data using Cintoo Connect and explores different options to format accompanying CSV file.
Permissions: users with roles including Upload or Delete Reality Data permission can import unstructured generic format scans with Cintoo Connect.
TABLE OF CONTENTS
- Uploading Generic E57/LAS/LAZ Using Cintoo Connect
- Scanning Path Requirements
- Using Quaternions for Orientation
- Using Heading Value for Orientation
Data expected by Cintoo Connect for this upload option is the following:
- Unstructured point cloud in E57, LAS, or LAZ format
- Trajectory /scanning path in CSV format (see Scanning Path Requirements)
Uploading Generic E57/LAS/LAZ Using Cintoo Connect
1. Open Data tab and click Prepare & upload on Mobile laser scans tile or click Mobile scan from Add drop-down menu on the top right. Cintoo Connect will launch.

2. In Mobile Laser Scans tab in Cintoo Connect, select Generic E57/LAS/LAZ as Device/Format.

3. Select E57, LAS, or LAZ file as Point Cloud.

4. Select CSV file as Scanning Path.
See Scanning Path Requirements for more information.

5. Modify position sampling value as needed by entering a value into Generate a virtual vantage point for 1 of__ position.

- For example, 1 of 1 position will create 1 Virtual Vantage Point (VVP) in Cintoo for every position included in scanning path CSV. 1 of 4 positions will create 1 VVP at every 4th position included in scanning path CSV.
- Number of VVPs and average distance between each one will be indicated in Cintoo Connect and will be added to scan count.
6. Enable or disable Blur faces.

- It is checked by default, thus enabling automatic blurring of people (i.e., faces) captured in any panoramic images included in scans being uploaded to Cintoo.
- Uncheck this option to prevent automatic blurring of people's faces in panoramic images.
- Blurring cannot be undone in Cintoo after scans have been uploaded.
- Any files uploaded without Blur faces option enabled must be deleted from Cintoo project and re-uploaded with the option checked to apply automatic blurring.
7. Modify Data to process in parallel value as needed and according to available PC cores.

With a multi-core PC, it is possible to process more than 2 scans (default setting) in parallel.
On average, at least 400 MB of RAM per 10 million pixels is needed to process. For example:
- 8 GB of RAM will allow to process 5 scans of 40 million pixels each in parallel.
- 64 GB of RAM will be needed to process 5 scans of 160 million pixels each in parallel.
9. Click Import.

- New 3D scans will appear one by one in Cintoo project.
- Check Messages tab from time to time to confirm the process is running smoothly.

Scanning Path Requirements
1. If equipment has no camera (no panoramic pictures are captured).
Create a CSV file that contains X, Y and Z location for each new 3D scan position to be created.
- Use comma ',' as column separator.
- Name columns as filename, x, y, z, qw, qx, qy, qz
- x, y and z values must be in project units, in the same coordinate system as the scans.
- When processing point cloud data, Cintoo Connect will create a 3D scan position at each one of these XYZ location, together with a panoramic image made from the point cloud (with or without color depending on point cloud colorization).
2. If equipment has captured panoramic images.
Associated 360° images must be stored in a single folder together with a CSV file containing the information about location and orientation of each panorama. Expected formats are the following:
All the 360° images will need to be spherical images in JPEG or PNG. Example spherical image.

The same folder needs to include a CSV file that contains 360° image name (with extension), location and orientation, for each 360° image.
The CSV file will need to be as follows:
- Use comma (,) as column separator
- Column for file name must be named filename
- Filenames should have their extension (.jpg or .png)
- For position, name columns as x, y and z
- x, y and z values must be in project units, in the same coordinate system as scans.
- Orientation needs to be given as a quaternion or as a simple heading
Note: since both quaternion notation and heading are supported as orientation, it is not possible to have heading and quaternion in the same CSV. It is either one or the other, otherwise Cintoo Connect will reject it.
Using Quaternions for Orientation
- Name columns as qw, qx, qy, qz
- First column should look like (the order does not matter): filename, x, y, z, qw, qx, qy, qz
- Set qw = 1 and qx = qy = qz = 0 for no rotation with quaternions.

Using Heading Value for Orientation
Create a column named heading in CSV file.
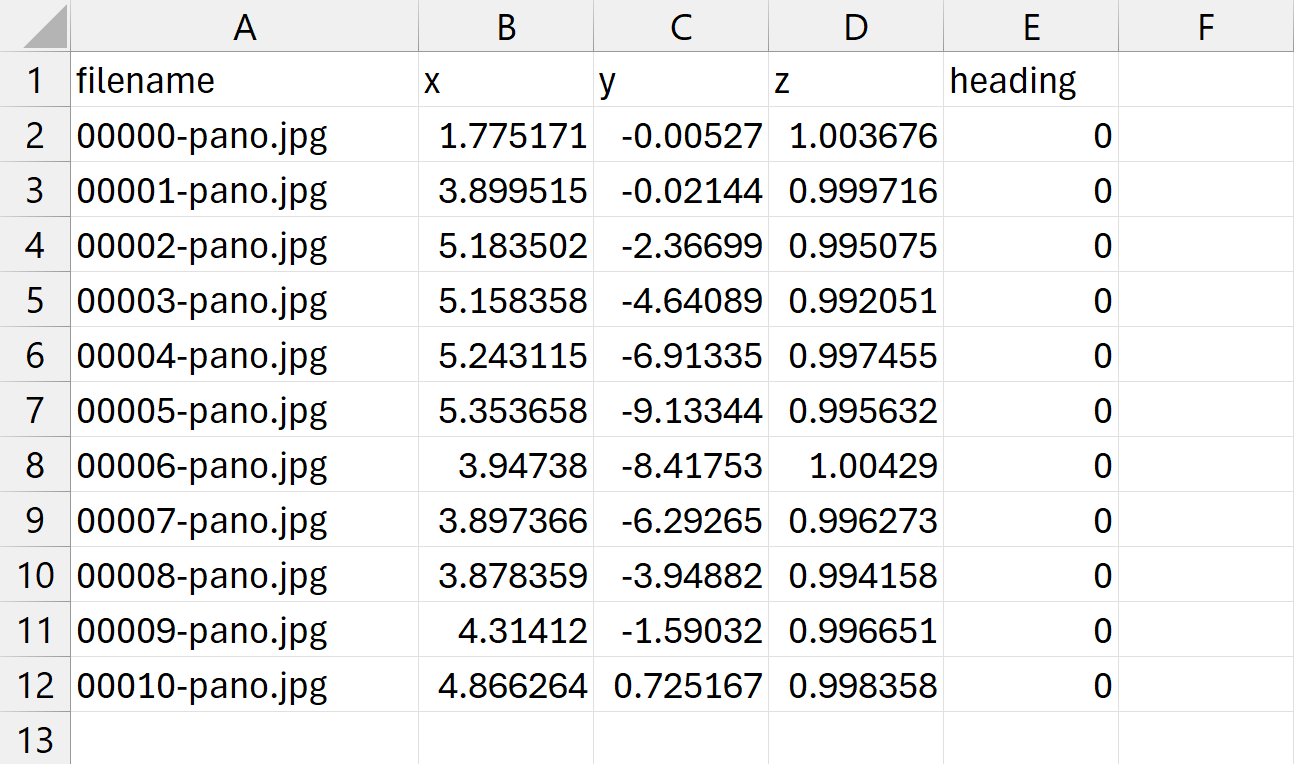
Heading parameter represents the angle in degrees, rotation around Z axis. From the top view, a positive angle represents a rotation in clockwise direction (towards east).
Note: when using heading there will be no rotation applied around X or Y axes. We assume that 360 images are well aligned vertically (plane crossing "equator" line must be parallel to XY plane), otherwise the image will look as it is not straight (example: a straight building would look like it has some slope).
Angle takes as reference the middle of the image and the north direction:
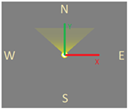
- Heading set to 0 degrees means that the user will see the middle of the image when looking towards north (+Y).
- Heading set to 90 degrees means that the user will see the middle of the image when looking towards east (+X).
- Heading set to 180 degrees means that the user will see the middle of the image when looking towards south (-Y).
- Heading set to 270 degrees means that the user will see the middle of the image when looking towards west (+X).
Note: Navigation Map at the bottom right corner can help to find out which direction the user is facing currently.